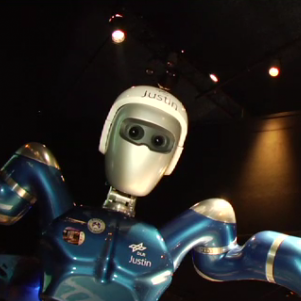
 Spoznajte Justina, androidnega robota, ki ga bodo kmalu začeli daljinsko upravljati astronavti iz laboratorija Columbus (ESA) na Mednarodni vesoljski postaji. S tem in drugimi zanimivimi poskusi, kot je na primer Eurobot rover, ESA odpira pot za raziskovanje Lune in planetov z daljinsko vodenimi roboti.
Spoznajte Justina, androidnega robota, ki ga bodo kmalu začeli daljinsko upravljati astronavti iz laboratorija Columbus (ESA) na Mednarodni vesoljski postaji. S tem in drugimi zanimivimi poskusi, kot je na primer Eurobot rover, ESA odpira pot za raziskovanje Lune in planetov z daljinsko vodenimi roboti.
V naslednjih dveh do treh letih bo poskusni robot na Zemlji zvesto posnemal gibanje astronavtov na mednarodni vesoljski postaji.
S pomočjo zunanjega nosljivega robota - kombinacije roke in rokavice z elektronskimi pripomočki za reprodukcijo občutkov, ki bi jih čutila človeška roka - lahko oddaljeni upravljalec dela, kot bi bil dejansko prisoten na kraju dogajanja.
ESA povezuje Mednarodno vesoljsko postajo z Zemljo preko daljinskega upravljanja zemeljskih robotskih poskusov, da bi tako pomagala vključiti robote in tele-prisotnost v vesoljske misije kot standardno orodje. Projekt METERON (Multi-purpose End-To-End Robotic Operations Network) je le testna raziskava za prihodnje odprave na Luno, Mars in druge nebesne objekte.

"Vesoljska postaja je najboljše mesto za simuliranje realističnih scenarijev človeškega raziskovanja," pravi Kim Nergaard, vodja oddelka Meteron pri ESA.
"Najprej moramo vzpostaviti stabilno komunikacijsko mrežo, operacijski sistem ter definirati protokol, da bi lahko astronavti, roboti in nadzorni center ESA učinkovito delovali skupaj. To ni tako lahka naloga, kot se morda zdi."

ESA je v začetku tega leta iskala nove ideje, kako bi lahko uporabili Mednarodno vesoljsko postajo v testnih projektih za raziskovalne misije. Veliko predlogov je vključevalo zemeljske robote, ki bi jih upravljali iz delovne postaje v vesolju.
"Število teh predlogov izkazuje pravo moč te ideje," komentira Philippe Schoonejans, šef direktorata za robotiko pri človeških odpravah in operacijah. ESA lahko tako omogoči izvajanje vseh predlaganih poskusov in tako da priložnost državam, podjetjem in inštitutom, ki so pokazali interes in dali ideje."
"Program Meteron je primeren za hitro realizacijo, saj lahko uporablja obstoječo infrastrukturo in tehnologijo, ne da bi zahteval velike naložbe," razlaga François Bosquillon de Frescheville, odgovorni pri ESA za konceptne študije bodočih človeških raziskovalnih misij, čigar ideja je sprožila izvajanje programa.
Najprej rover, nato android
V prvih testih programa Meteron bodo astronavti na Mednarodni vesoljski postaji uporavljali prototip Eurobota z računalniško opremo s posebnimi ekrani in krmilom.

Ta prototip je štirikolesni rover z dvema rokama, ki ga odlikujejo napredni navigacijski sistem, kamere in senzorji, ki so jih od leta 2008 testirali na vesoljskem raziskovalnem in tehnološkem centru ESTEC na Nizozemskem.
V drugi fazi projekta bodo astronavti upravljali robota s sile in "dotika". Tega je mogoče povezati z roboti, kot je Justin, ki so ga razvili v nemškem vesoljskem centru DLR.
"S temi pripomočki bodo imeli astronavti realen občutek za sile, ki jih robotove roke doživljajo v svojem okolju, " razlaga André Schiele, glavni v laboratoriju za telerobotiko pri ESA. "Na primer ko potiskajo skalo ali opravljajo bolj kompleksne naloge, kot je sestavljanje strojne opreme."

Katerokoli pot že bo ubralo raziskovanje Lune in Marsa v prihodnosti, sofisticirana komunikacija in napredna oprema bosta vsekakor potrebni. Spodbujeni z novo tehnologijo vmesnika med človekom in robotom bodo astronavti pri raziskovanju planetarnega površja skoraj zagotovo povezani z roboti.
Vir: ESA